With the evolution of autonomous driving technology, urban intelligent driving has become the main direction of the development of the industry. Compared with the current mature high-speed scenes, urban scenes become more complex, mainly in the aspects of obstacle interaction, special scenes (such as intersections, roundabout and unstructured roads), and the current rule-based traditional decision planning algorithms cannot be fully applied. At the same time, with the maturity of AI, especially large model technology, and the gradual accumulation of autonomous driving data, the industry is converging views on the main line of future technology iteration based on data-driven prediction decision planning algorithm, that is, to realize the understanding of autonomous driving scene context semantics through AI, predict the behavior of other traffic participants and predict trajectories. Based on this, reasonable decisions and path planning can be made.
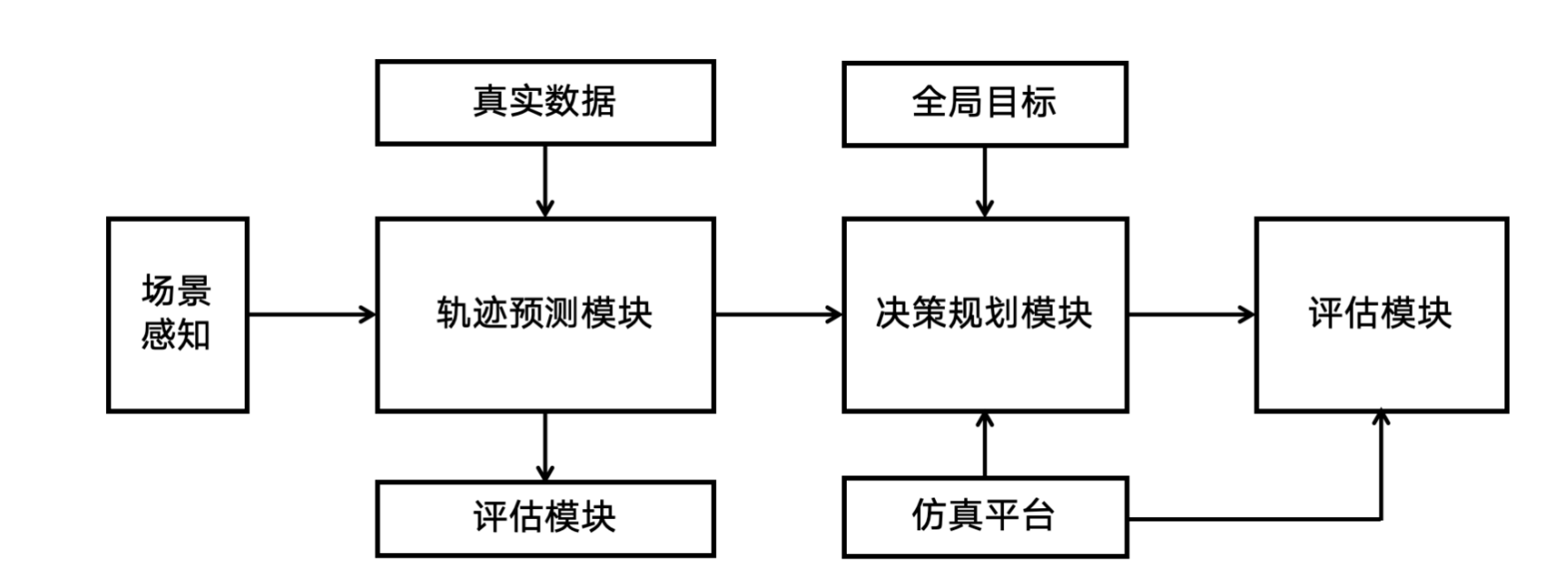
The main research goal of the project is to develop a deep learning algorithm prototype for prediction and decision making. The model uses real-time perception information, local map information and self-driving car behavior to predict the behavior of surrounding agents and obstacles, and obtain the predicted trajectory in the future. Based on the predicted trajectory of the surrounding agents, obstacles, local map information and navigation information, intelligent decision is made for the next stage of self-vehicle behavior, and horizontal and vertical decision information is generated for reference by the downstream planning module. The main research contents of this project include: trajectory prediction of other agents, autonomous vehicle decision planning, and trajectory planning algorithm based on reinforcement learning. Key ideas include Transformer-based predictive trajectory optimization, multi-expert planning decisions based on world models, and robust decisions based on reinforcement learning.
Copyright © 2024 Computer Vision Laboratory
Address:上海市闵行区东川路800号上海交通大学电院群楼
Zip:200240
备案许可证:沪ICP备05003369