随着自动驾驶技术的演进,城区智能驾驶已经成为业界发展的主攻方向。与当前较为成熟的高速场景相比城区场景变得更加复杂,主要表现在障碍物交互、特殊场景(如十字路口、环岛和非结构道路)等方面,当前基于规则的传统决策规划算法无法完全适用。与此同时,AI尤其是大模型技术的发展成熟以及自动驾驶数据的逐步积累,业界正在基于数据驱动的预测决策规划算法成为未来技术迭代主线上观点趋于一致,即通过AI的方式实现对自动驾驶场景上下文语意的理解,预测其他交通参与者的行为和轨迹预测,基于此做出合理的决策和路径规划。
项目的主要研究目标为开发面向预测和决策深度学习算法原型,模型利用实时感知信息、局部地图信息和自车行为对周边智能体、障碍物的行为进行预测,得到未来一段时间内的预测轨迹。基于周边智能体、障碍物的预测轨迹、局部地图信息和导航信息对自车下一阶段行为进行智能决策,生成横、纵向决策信息以供下游规划模块进行参考。主要研究内容包括:其他智能体的轨迹预测、自车决策规划,以及基于强化学习的轨迹规划算法。主要采用的思路包括基于Transformer的预测轨迹优化、基于世界模型的多专家规划决策以及基于强化学习的鲁棒决策。最终,本项目期望研发出具备在城区、环岛、非公开道路等复杂场景下自动驾驶能力的算法模型。
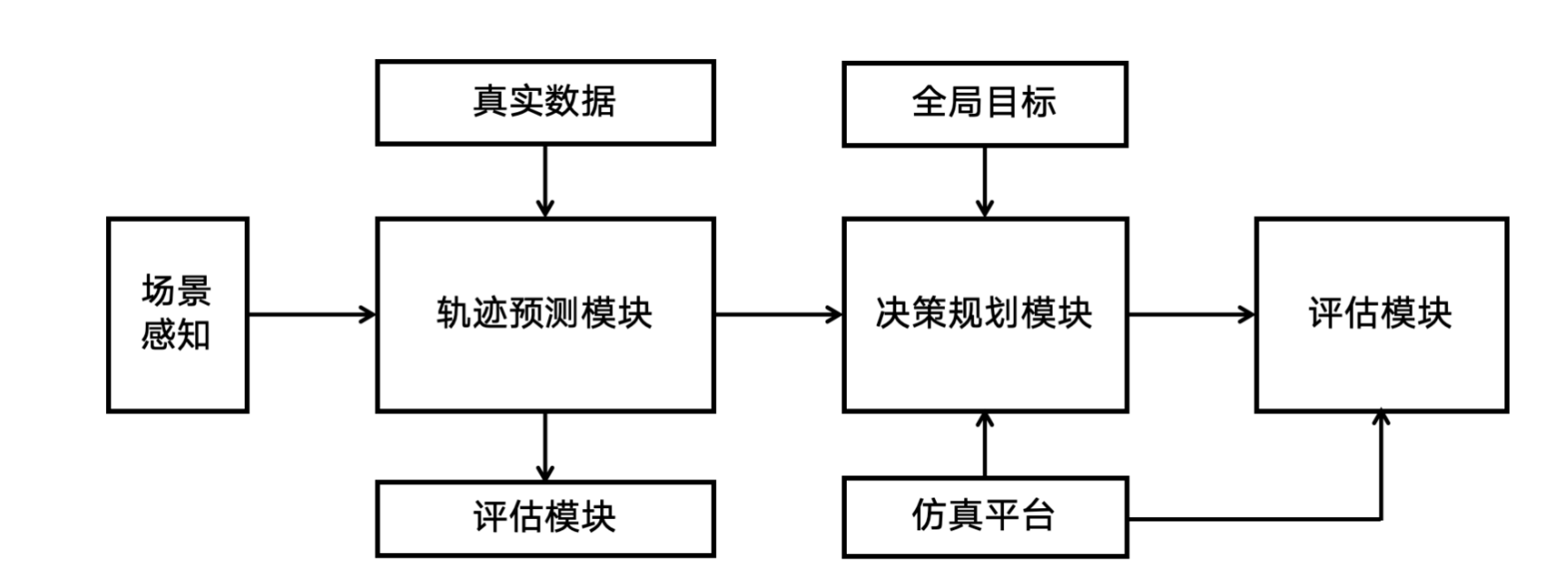
图1. 自动驾驶决策预测算法框图